

GPS技术在水利工程中应用与研究
GPS技术在水利工程中应用与研究
摘要:本文概述了GPS技术及其特点和在水利工程中的应用现状,并展望了GPS技术在水利工程中的应用前景.
[关键词]GPS技术;控制网精度;数据处理
1GPS在水电工程中应用概述
GPS技术在我国水电工程建设中已获得应用,但是,更深层次的开发和推广尚有待进一步开展,主要原因是水电工程特有的地形及环境条件。例如工程区域常位于深山峡谷,对可见卫星信号的接收有困难,以及对GPS定位精度存有疑虑、对目前GPS技术的进展了解不够等。从目前GPS定位精度来看,通过采用必要的数据处理技术,定位精度达到±1~±2mm是不困难的。因此,只要环境条件允许,在水电工程中积极推广GPS技术,对促进我国水电事业的发展将有积极意义。实时施工测控系统在三峡大坝早期围堰合拢时,GPS实时测量技术曾在合拢口的形态和水文特性的测量中得到应用,其实,GPS在水电工程中的应用可以挥更大的作用。大型水电工程施工场面很大,构筑物繁多。因此,传统的施工测量作业任务重,内容复杂,需要一支较大的队伍承担此任务。通常,施工测量必须建立多级控制网,逐级布设的控制网精度损失严重,受各种构筑物建设环节及位置所限,布网较困难。此外,控制网定期检查和复测的工作量也很大。
利用GPS实时相位差分技术(RTK)通常在几分钟内就很容易达到±10~±20m的定位精度。完全可以满足水工建筑物施工放样的精度要求,因此,在环境条件允许时。大型水电工程建设中应该采用GPS实时施工测控系统。在整个施工区域内,选定2~3个GPS固定点作为施测系统的基准点,施工期内进行连续观测。以GPS流动站测放。各构筑物部位,固定站和流动站间通过无线电通信,发以达到精确、实时、快速放样的目的。相比之下,常规的施工测量方法,GPS实时测控系统的建立将显著地改变长期延袭的施工测量技术。精度更均匀、实时快速、使用方便、控制面积更大、施测更灵活、不受通视条件所限的GPS测量系统,可以很方便地完成绝大部分施工平面定位工作。在定位要求较高的部位,可以采用GPS静态测量的方法,30min观测时段的定位精度可以达到±2~±3mm,满足较高精度要求的一些重要部位施工放样的需要。
此外,为了解决施工放样的高程精度要求,可以预先施测一些精密水准点,并对这些点进行GPS观测,利用目前GPS水准拟合方法,建立施工区域GPS水准的高程异常模型,实现水电工程施工中用GPS实时测控系统较精确地测放三维坐标。
大型水电工程施工中建立GPS实时测控系统,是一种应该推广应用的新技术。它不仅可以直接用与陆地上各放样点的自动、快速、准确、方便的定位,而且可以极大地降低劳动强度和测量工作的复杂性(多级布网、加密等),便于对控制系统的检查、复测。此外,GPS实时测控系统在施工过程中对河床断面、坝区水下地形、水文要素等各种有关的测量作业都能发挥重要作用。还可以应用于大堤防汛监测中,由每隔20km所建的基准站及大堤布设的流动站进行观测,经无线电信息传输,可快速、方便地获得各测点的位移情况,去精度约±10mm,不仅能够在防汛时反映大堤安全监测系统。
2GPS定位基本原理
2.1GPS观测量
GPS卫星信号含有多种定位信息,作为定位的观测量。主要有两种:即码相位观测量和载波相位观测量。所谓码相位观测,就是GPS卫星发射的信号到达接收机的时间,是通过GPS卫星发射的观测码信号(C/A码或P码)与接收机自身产生的观测码信号,经相位的几何距离测定。所谓载波相位观测,是通过求定接收机产生的基准信号的相位与接收到卫星的载波信号的相位之差来实现的。由于载波的波长比码元的宽度短得多,所以测量精度比用码相位要高。目前大地型GPS接收机都采用载波相位测量。
2.2GPS观测方程和定位方程(仅列出载波相位观测方程和定位方程)
载波相位观测方程为
ψ=f/c(ρ-δp1-δpr)-fυ1t+fυ2t-n(1)
式中ψ为载波相位观测值;c为真空中的光速;f为载波频率;p为卫星至接收机的距离;δp1为卫星信号通过电离层折射的改正;υ1t为接收机的改正;υ2t为卫星钟的改正;N为整周未知数。载波相位定位方程为设卫星坐标为Xs、Ys、Zs(可根据卫星信号计算出,为已知值),接收机(即测站)坐标为X、Y、Z(待求值),则
p=[(XS-X)2+(YS-Y)2+(ZS-Z)2]12
(2)设接收机(即测站)近似坐标为X0、Y0、Z0,其改正数为VX、VY、VZ,即有:
X=X0+VX
Y=Y0+Vy(3)
Z=Z0+Vz
设卫星信号从卫星至接收机传播时间为Δt,将(2)(3)式代入(1)式,并将p在(X0•Y0•Z0)上用泰勒级数展开,经线性化后得
-f/c(X0-Xs)/P0•Vx-f/c•(Y0-Ys)/P0•Vy-f/c•(Z0-Zs)/P0•f•Δt-f•V2t+N=f/c•(P0•t1+PV1t-ρ•Δt-δP1-δPr)-ψ(4)
(4)式中VX•VY•VZ•Vt1为未知数(因卫星上装有高精度的铯钟,故Vt2可求出。而接收机上不可能安装铯钟,故将Vt1作为未知数来求出),当观测4颗卫星的信号,即可求出这4个未知数,从而可求出测站点的三维坐标,完成定位。这就是GPS观测时,观测的卫星数≥4的原因。
2.3定位方法
定位方法分为绝对定位方法和相对定位方法,这里主要介绍相对定位方法的静态定位模式。确定同步跟踪相同GPS卫星信号的若干台(至少为2台)GPS接收机之间的相对位置的方法,称为相对定位。静态相对定位模式是相对定位模式中的一种。这种作业模式的作业方法是,将两台或两台以上的GPS接收设备分别安置在几个点上,同步观测1~2h。当观测站间的距离超过20km时,还要适当延长观测时间,当测站间距离不超过5km时,观测时间可缩短到45min左右。这样,用边连接方法构网,用后处理软件解算基线,经平差计算求定观测点三维坐标。对于双频GPS接收机,这种相对定位模式的精度可以达到5mm+1ppm•d,d为测站间的距离(km)。一般GPS控制网,都应采用静态相对定位测量方法。这种方法定位精度高,适用长边。
3实例
有一地区作控制见图1,测区已布设了三等和四等测图控制网,其成果为任意带直角坐标系,测区原有国家二等水准点二个,勘测阶段新布设了三等水准线,高程系统采用1985国家高程基准。为保证施工图的准确放样,施工控制网的基准必须与勘测设计阶段一致。
3.1数据检核
观测时由于受一些条件的影响,GPS观测数据有时出现异常,因此要对观测数据进行鉴别和删除,数据检核条件分独立观测环和同步观测环,其闭合条件必须分别满足:
GPS同步环坐标分量及全长闭合差:
式中n为环基线个数,a,b为GPS接收机标称精度的固定误差和比例误差,d为环中基线平均长度。闭合环检核精度见表1。
重复基线检核:共10条重复基线,较差最大为7mm,最小为0mm,平均相对误差为3.72pmm。除此外,测距仪实测边长经改化后也是GPS外业观测质量检校的基准。见表2、表3、表4。
表2检测原网点
3.2GPS数据后处理
GPS从导航定位应用于工程测量,最主要的是了解数据后处理软件,因此选择一个严密的后处理软件,选择一种适当的平差方法和准确参数基准是决定GPS测量成果好坏的关键。本例中我们采用武汉大学的专业平差软件《COSA》进行数据处理与平差计算。COSA是一个多功能的平差系统,平差方法严密,符合我国相关规范要求,平差结果正确,数据处理精度较高。精度如下
显然,以上精度已满足相应等级的施工控制网要求。控制点成果和精度,见表5。
表5控制点成果和精度
4结论
该实例GPS施工控制网的成功施测,说明采用GPS定位技术进行高精度水利工程施工控制网中有广泛的应用前景。同时也说明GPS技术发展到今天,已是一种具有高精度的成熟技术。随着广大研究者和测量工作者的不懈努力,可以展望将获得更深层次的发展和拓展该项技术在水电工程建设中的应用。
[参考文献]
[1]姜振富,王俊勒.GPS定位技术在工程测量中的应用
[J].地壳形变与地震,1993,13(2):49-561
[2]华锡生,何秀凤.GPS技术在水电工程中的应用及展望[J].水电自动化与大坝监测,2002,(4):6-91
[3]刘大杰,施一民.全球定位系统(GPS)的原理与数据处理[J].1996,(8):108-1251
[4]徐绍铨.GPS测量原理及在水电工程中的应用[J].大坝与安全,2003,(1):10-131

| 评论 |
|
|



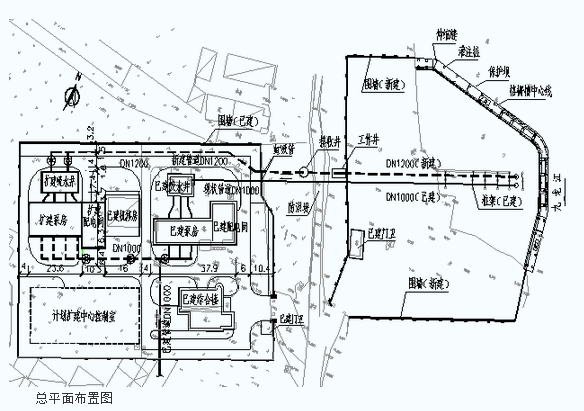 |
典型取水泵站扩建工程设计 |
| 论文导读:取水头部。设计采用新型双排拉森钢板桩围堰。虹吸管。穿越防洪堤。抽真空系统。总平面布置图.. |
热门文章

轻轻松松读懂地质报告
1、如何阅读勘察报告(1)直接看结束语和建议中的持力层土质、地基承载力特征值和地基类型以..[详细]